A moduláris, kis darabszámú, egyedi igényekre szabott gyártás elterjedésével az automatizációs technológiák iránti igény is változott: egyszerűbben programozható, a különböző részfolyamatokra könnyen adaptálható megoldásokat szeretnének a vállalatok – ezt szolgálják ki a grafikus interfészek, és a mind jobban elterjedő modellalapú megközelítések a robotprogramozásban.
Mindeddig egy robotikai rendszer telepítésében a költségek jelentős részét a robotprogramozás tette ki. Ráadásul hagyományosan a robotgyártó cégek egyes robotprogramjai szigorú és bonyolult keretrendszert szabtak, amelyek így nélkülözték a rugalmasságot. Egyrészt képzett robotprogramozók alkalmazását igényelték, akik a gyártóspecifikus forráskódokat írták, másrészt teljes elköteleződést egy-egy robotgyártó termékei iránt. Kicsi volt tehát az átjárás a különböző gyártók termékei között, és nagy kiadást jelentett egy cégnek az automatizációs folyamatok többnyire külső, nagyvállalatok esetén belső, szakképzett programozók által ellátott felügyelete. Különösen igaz volt akkor, ha egy ipari vagy mobil robotot többféle részfolyamat ellátására szeretett volna alkalmazni egy vállalat, amely manapság a kisebb darabszámú, speciális igényeket ellátó termelés elterjedésével egyre gyakoribb igény. Ezen kihívásokra születtek válaszként a modellalapú megközelítések.
Cél a rugalmasság
Az International Federation of Robotics (IFR) frissen megjelent anyaga szerint*, amely a robotprogramozás fejlesztési trendjeit foglalja össze, egy igen gyakori irány blokkokban leírni a robot attribútumait: fizikai megjelenését, a tevékenységeket, amelyeket végre kell hajtania, összetevőit, pl. érzékelőit, az aktuátorokat, vezérlőket, vagy más, gépek közötti interfészeket. A blokkok később több módon kombinálhatók anélkül, hogy mindegyikhez külön kódot kellene írni. A robotok így sokkal könnyebben programozhatók – egyszerű feladatok esetén akár termelési operátorok által –, amellyel szakértők becslése szerint a költségek akár 75 százaléka is megspórolható. Szintén az IFR számol be róla, hogy hasonló megoldást tesztel például a német Fraunhofer Intézet spin-off projektje. Az intézet egy interfészen keresztül elérhetővé teszi több gyártó robotokhoz csatlakoztatható kiegészítőjét: kamerákat, megfogókat, programozható vezérlőket. A drag&bot felület ezen felül modelleket biztosít az olyan gyakori feladatok ellátásához, mint a palettázás, és segíti az összetettebb folyamatok, például az áthelyezés (pick and place) testreszabását.
Egyszerűen kezelhető interfészek okostelefonon, laptopon vagy PC-n
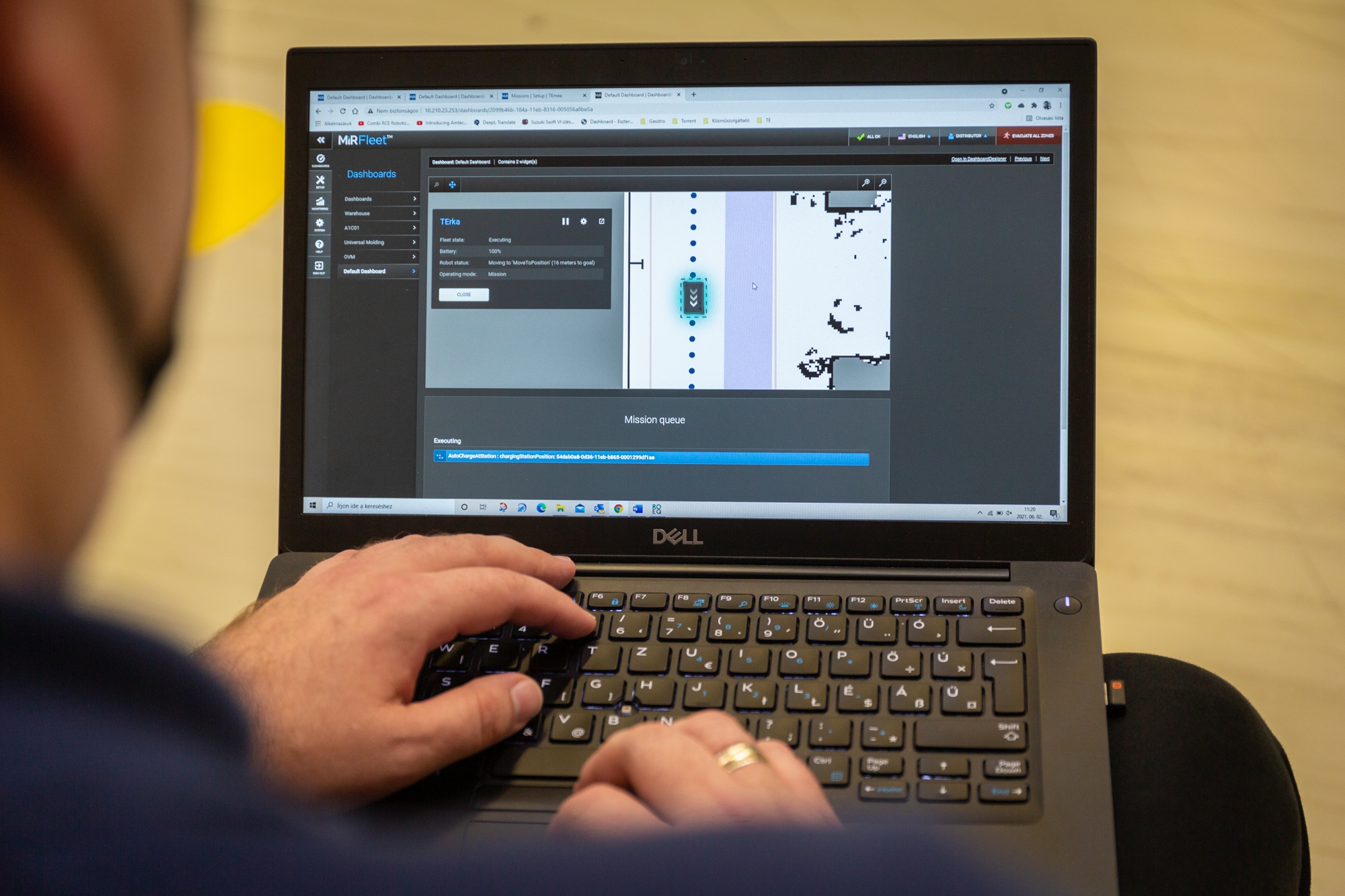
Az egyszerű felhasználáshoz elengedhetetlen a könnyen kezelhető, grafikus felületek alkalmazása, amelyben az innovatív robotgyártók az élen járnak, hiszen a kezdetektől erre törekedtek. Ilyen a dán Mobil Industrial Robots (MiR), amelynek intralogisztikában alkalmazható autonóm mobil robotjai (AMR) szoftverrel szerkesztett térképen tájékozódnak a lézerszkennerek vagy előre betöltött létesítményrajzok segítségével. A robotok intuitív módon taníthatók az alkatrészek felvételére, lerakására, a kamerákból, lézerszkennerekből, szenzorokból származó adatok alapján kiszámolják az optimális haladási útvonalat, és teljesen önállóan kerülik ki az útjukban álló akadályt attól függően, hogy az egy ember, AGV, vagy bármilyen más rögzített akadály.

A MiR egy rendkívül egyszerűen alkalmazható és felhasználóbarát interfészt fejlesztett a robotok irányítására, amellyel utat nyitott a vállalatok számára, hogy programozócsapat felügyelete nélkül is alkalmazhassanak AMR-eket a belső anyagmozgatásban. A felület egyszerűen, wifi-re kapcsolódva elérhető PC-ről, tabletről, vagy akár mobiltelefonról. A belépéskor pár adat megadását követően (amely a jogosultsági szintet is meghatározza) már neki is lehet állni a térképkészítésnek. Az interfész beépített térképező funkciója segítségével lehetőség van térkép létrehozására úgy, hogy a manuálisan körbevezetett robot a szkennerek segítségével feltérképezi a területet, amely azonnal szerkeszthető. Mindez segít a kezelők számára áttekintést kapni a robot környezetéről, és biztosítja, hogy a robot a legjobb útvonalat tervezze meg a hatékonyságot, és biztonságos közlekedést figyelembe véve. Ezt követően a feladatszerkesztőben be lehet állítani, hogy milyen küldetéseket lásson el a robot, például vegye fel a szállítandó tárgyakat, helyezze át egy másik helyre, vagy töltse fel az akkumulátorát egy töltőállomáson a megfelelő időben.

A térképek egyszerűen megoszthatók a robotok között, a feladatokat pedig le lehet menteni, így nyomon követhető, hogy melyik térképhez milyen feladatsort használtak korábban. A térképekhez további rétegek adhatók, amelyek szabályokat, irányelveket, célokat biztosítanak a robot számára, például lehetőség van piros zónák megjelölésére, amelyeket el kell kerülnie a robotnak. Mindezt azt jelenti, hogy a robotok betanítása egy-egy feladatra különösebb szaktudás nélkül is lehetséges, amely nem csak jelentős költséget és időt spórol a vállalatoknak, de közelebb hozza a technológiát minden alkalmazotthoz. Mindehhez a cég ingyenesen elérhető oktatóplatformot kínál, ahol mindenki szemezgethet a számára megfelelő tudásanyag között.
Összességében a robotprogramozás és -kezelés iránya egy felé mutat: a rugalmasan és egyszerűbben alkalmazható megoldások irányába, amely természetesen végül a költségcsökkentést és hatékonyságot támogatja.