Testreszabott firmware-adaptáció csökkenti a feldolgozási időt és egyszerűsíti a hővágógépek beállítását
Az acél univerzális alapanyag, amely számos iparágban nélkülözhetetlen. A kézi utómunkák kiküszöbölése és a megmunkálási folyamatok optimalizálása érdekében az ipari képfeldolgozás alkalmazása egyre elterjedtebb. A Peddinghaus Corporation ezt korán felismerte, és hővágó berendezéseiben például képfeldolgozó rendszereket alkalmaz. Az optimalizálási lehetőségek keresése során a vállalat a Balluff „Custom Design & Engineering (CDE)” részlegével együttműködve továbbfejlesztette a vizuális komponenseket – jelentős felhasználói előnyökkel.
A feszült globális helyzet ellenére a világ acéltermelése 2024-ben mindössze 0,8%-kal csökkent, így 1,88 milliárd tonnát tett ki. Ez jól mutatja, milyen meghatározó szerepe van az acélnak még ezekben az időkben is. A közhiedelemmel ellentétben ugyanis az előállított acél akár 95%-át a civil szektor fogyasztja. Az előnyök egyértelműek: az acél erős, alakítható, tartós és újrahasznosítható – ideális tulajdonságok az építőipar, az autóipar, a gépgyártás, az infrastruktúra és számos más iparág számára.
A németországi Gevelsbergben és az USA-beli Bradley-ben működő Peddinghaus Corporation 1903 óta meghatározó szereplő a nagy szilárdságú acél feldolgozásában az építőipar és az infrastruktúra területén. Széles termékportfóliójuk a fúrógépektől és szalagfűrészektől a hővágó gépekig terjed. Utóbbiak acélprofilok (például H, C, szög- vagy L-profilok) vágására vagy jelölésére szolgálnak. A vágás itt nemcsak darabolást jelent, hanem szerelőfuratok, illetve ferde vágások kialakítását is.
Példa a lézervonal pixeleiről
A PeddiBot termékcsalád például robotkar végére szerelt plazmavágóval biztosít precíz hővágást. A precizitás lényege, hogy a plazmavágó és az acélprofil közötti távolság állandó maradjon, így a vágás egyenletes, sorjamentes lesz, és nincs szükség utómunkára. A robotkar vezérléséhez szükséges adatokat 3D-s ipari képfeldolgozó rendszer számítja. Az acélprofilt a rendszer előtt vezetik el, amely folyamatosan rögzíti a rávetített lézervonalat, majd az adatokat egy gépi látásra kialakított ipari PC-n futó képfeldolgozó szerverre továbbítja. A folyamat során súlypont-algoritmus (COG) határozza meg a lézer vonalát, majd homográfia-mátrix segítségével a 2D pixelek valódi 3D koordinátákká alakulnak. Ezek alapján számítják a robot vágópályáit.
A szabadalmaztatott 3D-s vizuális szkennelési folyamat révén a Peddinghaus egyedülálló piaci pozícióval rendelkezik: a vágási minőség állandósága nemcsak gyorsítja a procedúrát, hanem feleslegessé teszi az acéldarabok külön mérési lépését is – mindezt lényegesen költséghatékonyabban, mint a versenytársaknál. A vállalat azonban folyamatosan törekszik a fejlesztésre, ezért a PeddiBot rendszer további optimalizálási lehetőségeit is vizsgálta. A fókusz a 3D vizuális rendszeren volt. Mivel a Balluff nyomás- és pozíciószenzorait már használták, a Peddinghaus a vizuális megoldásokat is a Balluff-tól kérte.
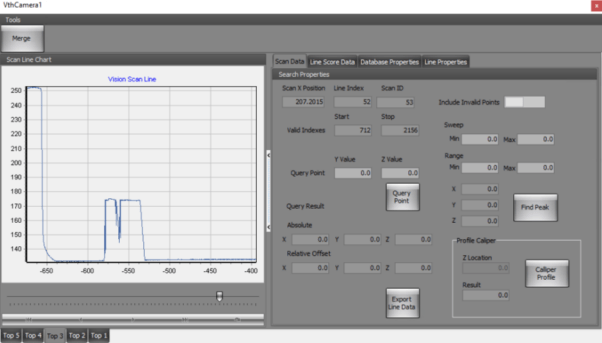
Szkennelési adatok a pozíció megjelenítésére
A Balluff standard ipari kameráinak választéka hatalmas, így a felbontás, interfész és képkockasebesség szempontjából is jobb megoldást találtak a BVS CA-GX0 sorozattal – egy GigE Vision kameracsaláddal, robusztus ipari csatlakozókkal és Power over Ethernet táplálással. Azonban egyetlen 3D kamera lecserélése két ipari kamerára önmagában még nem jelentett volna kézzelfogható előnyt. Itt lépett be a Balluff CDE részlege, amely egyedi kamerás és szenzoros megoldásokat kínál.
A BVS CA-GX0 ipari kamerák FPGA-val (helyben programozható logikai kapumátrix) rendelkeznek, így saját algoritmusokkal is felszerelhetők. A Peddinghaus javasolta, hogy a súlypontszámítás (COG) közvetlenül a kamerában történjen. A Balluff ezt megvalósította: módosította a kamera firmware-jét, így egy standard kamerából ügyfélspecifikus megoldást hozott létre. A kameraillesztők is átalakításra kerültek, hogy a Balluff Impact Acquire API felületén keresztül a GenICam-szabványoknak megfelelő, Peddinghaus számára testreszabott funkcióvezérlés legyen elérhető. Ez lehetővé teszi a COG-számítás API-n keresztüli ki- és bekapcsolását, valamint a lézerprofil érzékelésének optimalizálását (például küszöbérték vagy a lézerprofil minimális és maximális szélességének beállításával).
Bár az ötlet aprónak tűnhetett, a hatása az egész rendszerre óriási volt. Először is az ipari kamera csökkentette a teljes rendszer költségét: kiváltotta a drágább 3D kamerát, feleslegessé tette a képfeldolgozó ipari PC-t, és egyszerűsítette a rendszer beállítását. Másodszor, a Balluff széles szenzorkínálata nagyobb rugalmasságot biztosított a működési távolságok tekintetében. A korábbi 3D kamerák felbontása korlátozott volt, és indokolatlanul szűkítette a hővágó gépek munkatartományát.
PeddiBot HMI a feldolgozott szkennelési adatok és az ideális munkadarab-profil összevetésével
A Balluff ipari kamerájának firmware-adaptációjának köszönhetően a PeddiBot új generációja, a PeddiBot-1250 ST, már nem egy, hanem öt ipari kamerát használ, amelyek 1250 mm szélességig képesek az acélgerendák felső és oldalsó részének érzékelésére. Továbbra sincs szükség külön képfeldolgozó PC-re, és az öt kamera együttes költsége még mindig jelentősen alacsonyabb, mint egyetlen 3D kamera. A Peddinghaus Corporation az egész fejlesztési folyamat során motiválónak és gördülékenynek találta az együttműködést a Balluff-fal, mivel mindig rendelkezésre állt egy szakmai kapcsolattartó, aki még a látszólagos akadályokra is megoldást talált. Ez a „Custom Design & Engineering (CDE)” egyik legnagyobb erőssége.
Szerző:
Dipl.-Inform. (FH) Ulli Lansche, műszaki szerkesztő, Balluff MV, Oppenweiler
Elérhetőségek:
www.balluff.com
www.peddinghaus.com
Ha feliratkozik a Műszaki Magazin Hírlevelére, sosem marad le a híreinkről! További friss híreket talál a Műszaki Magazin főoldalán! Csatlakozzon hozzánk a Facebookon is!